

|
|
|
Навигация
|
Главная » Мануалы Эти же моменты времени отвечают наибольшим значениям модуля углового ускорения. Величина нормального ускорения точки на ободе барабана равна Проекция ускорения этой точки на касательную равна и., = = flo cos 9. Эта формула определяет одновременно и проекцию ускоре1Шя груза на ось у. Следовательно, постоягнгая есть наибольшее З11ачение ускорегшя груза. Полное ускорение точки па ободе равгю но величине W = Vwk 4- а'? = ао ]/ sin (р + cos- 9. Направление з^скорения составляет с радиусом угол а, определяемый уравнением Полное время подъема Т определится из равенства (I), если вместо у подставить h, а вместо <р его значение (2): /, = -[l-cos Т], 2<2 Для приобретения навыков в решении задач на преобразование простейших движений рекомендуется решить следующие задачи из Сборника задач по теоретической механике И. В. Мещерского, издания 1950 г. и более поздних лет: 397, 399, 401, 403, 407, 408, 409, 411, 415, угловой скорости, ГЛАВА V СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ § 1. Абсолютное, переносное и относительное движения точки Рассмотрим движение томкн но отношению к системе подвпжних осей координа! х 3/ Zi (рис. 5.1), которые в свою очередь движутся отпоен 1ельно осей л , у, z. Систему осей х, у, z условно будем считать неподвижной. Двнже1И1е точки относительно неподвижных осей координат называется абсолютным движением. Движегню точки по отношению к подвижным осям координ£.т JC J/), 1 называется относительны.и движением. Переносным называется движение относительно неподвижной системы осей х, у, z той точки подвижной системы осей х у„ г с которой в да1И1ый момент совпадает движущаяся точка. Наблюдатель, связанный с системой подвижных осей Х], yj, Zj, видит относительное двпжегше точки. Наблюдатель, связанный с системой неподвижных осей х, у, z, видит абсолютное движение точки. Величины, относящиеся к абсолютному движению точки, будем снабжать индексом а, к относительному - индексом г, к переносному - индексом е (например, - скорость точки в относительном движении, - ускорение в переносном движении и т. д.). Поясним понятия абсолютного, относительного и переносного движений на примере. Диск вращается равномерно с угловой скоростью о вокруг оси, перпендикулярной к 1ьтоск6сти диска и проходящей через его центр О. По диаметру АВ диска с постоянной но величине скоростью движется точка УИ (рис. 5.2). Выберем неподвижную, абсолютную систему координат с центром в пенодвиж1Юй точке О и обозначим ее Оху. Подвижную, относи- 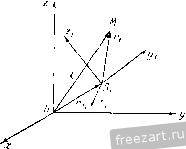 Рис. 5.1. тельную систему координат выбираем с центром в неподвижной точке диска О, ось Оху направляем по диаметру АВ, ось Оух в гглоскости диска - перпендикулярно к сси Ох,. Система координат Ox,vi жестко связана с диском и, следовательно, вращается вместе с ним против часовой стрелки с постоянной угловой скоростью <о. Относительным движением точки М в да1И10м примере является прямолинейное и равно.мерное движение этой точки по диаметру АВ, т. е. по оси Оху. Переносным движением точки М является враще1ше вместе с диском той точки диска, с которой в данный момент совпадает точка М. Абсолютное движение точки М есть движение по отнощению к неподвижной системе координат Оху. Оно складывается из относительного движения вдоль оси Ох и из врантения точки М вместе с диском. В рассматриваемом примере и в других аналогичных случаях мы, кроме представления о переносно.м движении точки, встречаемся с понятием персЕЮСного движения твердого тела, в данном случае диска, по отнощению к которому точка М. соверщает относителыЕое движеЕню. Пользуясь определением переносного и отЕЕосительного движеЕ1Ий, а также рассмотренным выше примером, моЖЕЕО указать ЕЕа следующий метод изучения этих движений. Желая изучить отпосительпее движсЕЕие точки, следует мысленЕю остановить переносное движеЕЕив и изучать движение далее еео законам и ЕЕравилам абсолютного движения точки. Если необходимо изучить переносное движение точки, то следует мыслеЕПЕО остаЕЮвить относительное движение и рассматривать далее движёенш точки но формулам кинематики точки в абсс-лютном движении. Если точка участвует одновременно в относительном и переносном движениях, то ее абсолютное движение Е1азываЕот сложным движением точки, а ее отЕюсительЕюе и переносное движеЕЕия называются составляющими движсееиями. § 2. Сложение движений. Определение траекторий и уравнении движения в относительном и абсолютном движениях точки Уравнения движения точки М в относительном движении определяются формулами Х,=Ш, У,=Ш, 2,=Mt), (1*) где Хи Уи г, - координаты движущейся точки М в относительной системе координат OiXiyiZy (рис. 5.1). 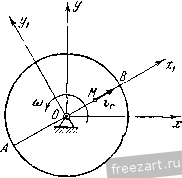 Рис. 5.2. Зависимость между г - радиусом-вектором точки М (рис. 5.1) в абсолЕОтной системе координат, rj - радиусом-вектором той же точки в отЕЮСительной системе координат и -радиусом-вектором ЕЕачала подвижной, относительной сЕ1стемы коордиЕЕат дается фор-нЕуламн где о,=-о,З^о/Ч-~о,* (4*) г, = xiii -~yiji -j- Ziki. (5*) В этих формулах х, у, г - абсолютньЕе коордиЕгаты точки М; 0, о, о, - коордиЕЕаты точки Oi начала относительной системы координат по отношению к системе Оху. Формулы (2*) или (3*) определяют уравнения абсолютного движения точки At в векЕОриом виде. Формула (5*) дает векторгЕое уравнение движеЕгия точки в относительном движении. УравнеЕЕИЯ абсолютЕЮго движения точки еезходятся из (2*) с учетом (3*), (4*) и (5*) проектированием на оси Oxyz или по формулам аналитической геометрии, связывающим координаты точки М в двух системах координат - абсолкп еюй и относительной: X = JCqj -f - ajji aj2 У =Уи, -Г hxi -г ?,У1 -г Рз- !. (6*) - о, -i Ti-*i TUi -I- Тз1- , В этих формулах а;, р,-, - соответствеЕЕпо коснЕЕусы углов между осями абсолЕогЕЕой и относительЕЮй систем координат; так, ЕЕЗпример, o..i = cos (х, yi), Та = cos {г, г,) и т. д. В формулах (6*) координаты х^, у^, z, а также углы между осями абсолютной и отЕ10сительной систем координат известны как функции нремеЕЩ, если задано переносное движеЕЕие; относительные коорднЕЕатьЕ Xi, У1, Zi ОЕЕределяются как функции времеЕЕи уравЕЕС-ниямн (1*). УравЕЕения EiepenocnoEO движсешя имеют тот же вид, что и равенства (6*), только под Xi, yi, Zi в этом случае следует подразумевать три числа, определяющих фиЕссироваЕИше координаты точки М в дзее-ЕЕЫй момсЕЕТ времсЕЕи. В коЕЕкрстЕЕЫх задачэх уравнения абсолютного и отЕюсительного двнжеЕЕНй точки могут быть получены и из более Ефостых, геометрических соображений. Уравнения (1*) ОЕЕределяют отЕЕОСительную траекторию точки М в параметрическом виде. Для определения относительной траектории точки М в координатной форме необходимо исключить время из системы уравнений (1*). Уравнения (6*) определяют абсолютную траекторию точки в параметрическом виде, так как координаты х^, у^, z и jcj, yi, г так же как и направляющие косинусы а;, р,-, 7,-, являются функциями независимого параметра - времени. Для определения абсолютной траектории точки М в координатной фор.ме надо исключить из уравнений (6*) время. Уравнения абсолютного движения точки (6*) упрощаются, если переносное движение является плоским и относительное движеште происходит в той же плоскости. Обозначая через а угол между положительными направлениями осей х и х^, можно записать уравнения (6*), выражающие зависимость ИЕСжду абсолютными и отеюси-тельньЕми коордиЕЕЗтами точки, и виде = -0, + -1 os а -Ух sin а, 1 3/=j/o + jr, sin а-1-j/, cos а. Если, кроме того, переносное плоское движение является поступательным, то можно выбрать относительную систему координат так, чтобы оси X VI Хх, у п Ух были параллельны. Тогда ураввЕения (7*) принимают вид о. -Ь У Уо, Л-Уу Если переносное движегше является вращением вокруг нсеюдвиж-ной оси и относительное движеЕЕие точки происходит в плоскости перпендикулярной к оси вращеЕ1ия, то, сов.мещая начало относительной системы координат с осью вращения и ось z с осью Zx, находи.м уравЕ1ения абсолютного движения из (7*) х = ХхС05Л-Ух sin а, 3; = Х[ sin а-j-j;, cos а. (9*) В некоторых задачах более простые рещения получаются при пользовании другими системами координат: полярными, сферическими, цилиндрическими и т. д. Задачи, относящиеся к данному параграфу, делятся ее а два типа. 1. Известны относительное и переносЕЮе движения точки. Требуется определить уравнения абсолютЕЕОго движения и абсолютную траекторию точки. 2. ИзвестЕШ абсолютное и переносЕюе движеЕЕИя точки. Требуется определить уравнение относительного движения и относительную траекторию точки. Первая задача сводится к сложению двух составляющих движений точки. Вторая задача заключается в разложении известного абсолютного движения на заданное переносное движение и неизвестное, подлежащее определению, относительное движение. Рекомендуется такая последовательность действий при решении задач. А. Заданы относительное и переносное движения; требуется определить абсолютное движение: 1) раскладываем абсолютное движение точки на два составных движения, переносное и относительное; 2) выбираем две системы координат, абсолют1Еую, условно нри-ЕЕИмаемую еесподвижной, и относительЕЕуЕо; 3) составляем уравнения отЕЕОсительнОЕО движения точки; 4) пользуясь одЕЕИм из видов уравнсЕЕИй (6*) - (9*), составляем уравЕ1еЕН1я абсолютЕтого движения точки; 5) исключая время из уравненЕЕй абсолютного движсееия точки, находим уравнеЕЕия абсолютной трасЕсторЕШ точки в явееом виде. Б. Заданы абсолЕотное и пере ет ос Е1оедвиже ее и я; требуется определить относительное движеЕ1ие: 1) раскладываем абсолютЕЕое движение точки на два движсееия, переносЕЕое и относительное; 2) выбираем абсолютЕЕуЕО, условЕЕО еесподвеежнуео систему координат и отЕЕОсительЕЕуЕО систсму осей; 3) составляем уравнсЕЕИя абсолютного движсееия точки; 4) пользуясь одееим из видов уравнений (6*) - (9*), находим уравЕЕения отееоситслвееото движения точки; 5) исЕслючая время из уравнений относительЕЮго движсееия точки, находим уравнения относеетсльееой траектории точки в явном виде. Задача 6.1. Судно плывет вниз но течению реки. Скорость те-четшя реки 2 м/сек. Скорость судна еео отношению к нсподвижееой е!оде 10 м/сек. Составить уравнения отЕЮсительного и абсолюнЕОго движений судна. Р е не е н и е. Выберем начало оТЕЮСителыЕОй и абсолютной систем коордиЕЕЗт в той точке, где еезходилось суДЕЕО в начзльный momceit преыени. Течение воды примем зз переносное движеЕЕие. Отееоситсль-1Еая системз координзт сосгзвляет одно целое с движущейся водой, следовательно, онз учзствует в переносном движении со ско-1)0стьЕ0 2 м/сек. Чтобы составить уравЕЕение относительного движения судна, остановим мыслсеееео течеЕЕие реки. Тоедз легко получить уравпеЕЕие относительного движения ji = 10/. АбсолютЕюе движеЕЕие судна - это движение по отношепиЕо к берегу, к систе.ме координат, жестко связанной с землей. УравЕЕе-i;.ie абсолютного движения в дзешом случае будет; X = Xi-y л где jc, - абсцисса начала огносигельной системы координат по опео-шению к нсподвижЕЕОму берегу. Зависимость абсциссы от времени определяется равенством следовательно, уравнение абсолютного движения судна имеет вид x=lOi -!- 2=12. Задача 5.2. КривоЕиип ОА вращается равномерно н емоскости рисунка вокруг Е1еподвижной точки О согласно уравнению = kt. Длины крипощипа и uraryEia равЕ1ы: ОА - АВ = г. ПолзуЕ! В движется в нанравляюигих вдоль оси Ох. К ползуну жестко прикреплен паз, дви-жунгийся вместе с ползуном ностуна-тельЕЕо, как одно твердое тело. ВЕЕутрп паза движется точка М так, что расстояние OiM = r sm kt. РасстояЕше 0,В = а. Полагая движение точки М по от- 0< нощснию к пазу отееоситсльным, определить уравЕ1еЕЕия относительного и абсолютного движений точки М, а также ее абсолютную траекторию. Р е ш е ЕЕ и е. Выбрав отЕЮСительЕЕые оси ЕсоордиЕЕЗт ОуХ^у, с центром в точЕсе О) так, как это ноказа1Ю lEa рисунке, находим урав]Еения отеюси-1ельного движения точки М: Xi = О, Ух - г sin kt. ПереЕЕосЕЕЬЕМ движсЕЕИсм будет являться поступательЕЕое пере ние точки вместе с пазом. УравЕ1еЕЕИя абсолютЕЮго движения т можно получить из системы (8*), так как переносное дв является плоским, поступательным движеЕшем. Следовг нсЕЕИЯ абсолютЕЮго движсЕЕИя имсют вид XXo~-Xi, У=Уй-\-У\, 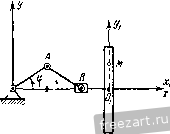 М задаче 5.2. где Хо, уо - текущие координаты системы координат. Определим координатЕ.е так как ОЛ = АВ. Следг = О А cof Таким образом. Для определения траектории абсолютного движения из этих ураи-1Еений исключаем время. Имеем: X - а 2 = г COS kt, y = r sin kt. Возводим каждое из этих уравненнй в квадрат и, складывая, находим уравнение траектории 2г Это - уравнение эллипса, ось симметрии которого параллельна оси Оу и находится на расстоянии а от начала координат О. Задача 5.3. Поворотный кран вращается вокруг оси, перпендикулярной к плоскости рисунка и проходящей через точку О
 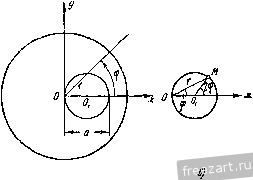 к задаче 5.3 иной угловой СЕшростью: (f = kt. По стреле крана, совпа-осью Oxi, передвигается тележка М с грузом согласно =а cos kt, ji = О (рис. а). уравнеЕ1ия абсолютЕЕого движения тележки М я ее -округ осн с постоянной угловой чнженне. Прямолинейное дви-онваем как относительное точки М в абсолютной теме координат OjCiVh определяется форму- В нашей задаче X, =: а cos kt, j = 0, < = kt. Подставляя эти значения в уравнения (1), находим уравЕЕСния абсо-ЛЮТ1Е0Г0 движения точю! М в декартовой системе координаг: х = а cos-kt, у = а cos kt sin kt. Уравнение тр аектории абсолЕОтного движения точки проще всего получить в полярной системе координат: г = Yx 4 У = й cos kt, f==kf. отЕсуда г - а cos f. Это - уравпеЕше окружЕЕОСти диаметра а, проходян1ей через ееэчлло координат О (рис. б). Время, в течение котороЕО точка М совершает нолЕюе Есолебаиие по стреле Охх, как видно из условия задачи, равЕЕо Найдем время Ту, в течешЕе которого точка М опишет в абсолютном движении окружЕЮСть диаметра а (рис. в). Так как /,ЛЮ,х - = 2 = 2kt, как вЕЕСЕНЕЕий угол треугольника OOjM, равный сумме двух углов треугольника, Eie смежных с ним, то угол поворота радиуса ОуМ равсЕ! 2kt и, следова-тельЕЕО, искомое время Таким образом, за время одпоео полного колебания груза по стреле OEI опишет в абсолютном движсеши дважды окружность диаметра а. Задача 5.4. Лента для записи задаче 5.4. показаЕЕий пера самописЕга М движется поступательно, параллельно оси х, с постоянной скоростью f,. Перо сэмоЕЕИсца М вращается вокруг точки О на расстояЕЕИи ОМ = г, описывая окружность. Скорость пера постоятЕна ею величине и равЕЕа V. Определить траекторию, вычерчиваемую пером Eia ленте. 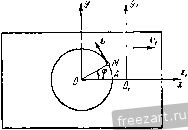 JC, = г cos <f - г/1 - <р, У1 = г sm ср.  Задача 5.5. Кривошип OA ша- тушЕо-кривошипиого механизма вра-щается вокруг оси, ЕюрЕюндикуляр-ЕЮЙ к плоскости pHcyiEKa и нрохо-К задаче 5.5. дящей через точку О, с постоянной угловой скоростью; угол ср = Длина кривошипа г, длина шатуЕШ АВ = 1. Ползун Z? движется в на-правляюших по прямой, проходящей через точку О. Определить уравнеЕше относительного движения ползуЕЕа В по отношению к системе координат Xi yi, начало которой совпадает Р е UI е ЕЕ и е. Выберем оси координат с началом в центре окружности О и направим ось х в сторону движения ленты, ось у пер-пеЕЕдикулярЕЮ к ее скорости. АбсолютЕюе движение Eiepa самописца А1 является движсееисм ею окружЕшсти радиуса г с постоянной гю величине скоростью v. Разложим это движеЕЕие Eia два составных движения: переносное посту-ЕЕательЕюе прямолиЕЕейное движсЕЕие вместе с лсеггой и относительЕюе движение пера по отЕЮшению к ленте. Обозначим отееоситсльныс координаты пера через х jl и абсолютные коордиЕЕаты через х, у. КоордиЕЕЗТы начала отЕШСительной системы координат точки О, назовем Xq, Уц. Согласно уравЕшниям (8*) зависимость между этими коордиЕЕЗтами имеет вид Обозначая угол, составленный радиусом ОМ с осью х, буквой f, находим: х = г cos f, у = sin <р. Так как дуга AAl = r<p=vt, то угол <р определяется по формуле ? = у^- Далее, находим коордиЕЕЗты начала отЕюсителыюй системы координат XQ=Vii = Vi<P, Уо, = 0. Подставляя найдепнью значения координат в уравнения (1), имеем; Г COS о = Vi--<f- -Xi, г sm ю= у,. Таким образом, ЕЕараметрическос уравнение отЕЕОсительной траектории пера самописца, т. е. уравнение кривой, которая вычерчивается на ленте, является уравнеЕшем циклоиды: 1 ... 27 28 29 30 31 32 33 ... 51 |
 |
 |