

|
|
|
Навигация
|
Главная » Мануалы статика Теоретическая механика - это наука, в которой изучаются общие законы механического движения и механического взаимодействия материальных тел. Механическим движением называется перемещение тела по отношению к другому телу, происходящее в пространстве и во времени. Курс теоретической механики делится на три раздела: статику, кинематику и динамику. Статикой называется раздел механики, в котором изучаются методы преобразования систем сил в эквивалентные системы и устанавливаются условия равновесия сил, приложенных к твердому телу. Кинематикой называется раздел механики, в котором изучается движение материальных тел в пространстве с геометрической точки зрения, вне связи с силами, определяющими это движение. Динамикой называется раздел механики, в котором изучается движение материальных тел в пространстве в зависимости от действующих на них сил. Приступая к изучению статики, следует определить оснЬвные понятия механики, встречающиеся в этом разделе. Материальное тело, размеры которого в рассматриваемых конкретных условиях можно не учитывать, называют материальной точкой. Материальная точка о'бладает массой и способностью взаимодействовать с другими телами. Например, при изучениии движения планет солнечной системы вокруг Солнца их размерами о сравнению с их расстояниями от Солнца пренебрегают и рассматривают эти планеты как материальные точки. Системой материальных точек, или механической системой, называется такая совокупность материальных точек. в которой положение и движение каждой точки зависят от положения и движения других точек этой системы. В теоретической механике часто рассматриваются такие тела, расстояния между любыми точками которых остаются неизменными. Такие тела называются абсолютно твердыми телами. Полагая тела абсолютно твердыми, не учитывают деформаций, которые возникают в реальных телах. Это значительно упрощает изучение действия сил на тело и условий, при которых эти силы уравновешиваются. Условия равновесия сил, приложенных к абсолютно твердому телу, используются при изучении действия сил на деформируемое тело. Твердое тело может находиться в состоянии покоя или некоторого движения. Каждое из этих состояний условимся называть кинематическим состоянием тела. Важнейшим понятием теоретической механики является понятие силы. Взаимодействие двух тел, способное изменить их кинематическое состояние, называется механическим взаимодействием. Сила - это мера механического взаимодействия тел, определяю-ш,ая интенсивность и направление этого взаимодействия. Сила определяется тремя элементами: числовым значением {модулем), направлением и точкой приложения. Сила изображается вектором (рис. 1). Прямая, по которой направлена данная сила.  Рис. 1, называется линией действия силы. За единицу силы в Международной системе единиц измерения СИ (в механике система МКС) принимается ньютон (н). Совокупность нескольких сил, действующих на данное тело или систему тел, называется системой сил. Системы сил, под действием каждой из которых твердое тело находится в одинаковом кинематическом состоянии, называются эквивалентными. Сила, эквивалентная некоторой системе сил, называется равнодействующей. Система сил, которая, будучи приложена к твердому телу, находящемуся в покое, не выводит его из этого состояния, называется системой взаимно уравновешивающихся сил, Силы, действующие на механическую систему, делят на две группы: внешние и внутренние силы. Внешними называют силы, действующие на материальные точки (тела) данной системы со стороны материальных точек (тел), не принадлежащих этой системе. Внутренними называют силы взаимодействия между материальными точками рассматриваемой системы. Основной задачей статики является исследование условий равновесия внешних сил, приложенных к абсолютно твердому телу. § 2, Аксиомы статики Приступая к изучению курса статики твердого тела, рассмотрим аксиомы, лежащие в основе этого курса. Эти аксиомы сформулированы на основе наблюдений и изучения окружающих нас явлений реального мира. Некоторые основные законы механики Галилея - Ньютона являются одновременно и аксиомами статики. 1. Аксиома инерции Под действием взаимно уравновешивающихся сил материальная точка {тело) или находится в состоянии покоя, или движется прямолинейно и равномерно. Аксиома инерции выражает установленный Галилеем закон инерции. 2. Аксиома равновесия двух сил Две силы, приложенные к твердому телу, взаимно уравновешиваются только в том случае, если Рис. 2. их модули равны и они направлены по одной прямой в противоположные стороны (рис. 2). 3. Аксиома присоединения и исключения уравновешивающихся сил Если к твердому телу, находящемуся под действием некоторой системы сил, приложить уравновешивающуюся систему или исключить такую систему сил, то получится система сил, эквивалентная заданной системе. Пусть, например, к твердому телу приложены силы Pj, Pj, Р3 и Р4, под действием которых тело находится в покое или совершает какое-то движение (рис. 3). Приложим к телу две равные  противоположно направленные силы Qj и Q, которые взаимно уравновешиваются Если тело в покое, то оно сохранит его; если тело в движении, то оно будет двигаться под действием новой системы сил Q Qj, Рр Pj, Р3, Р4 так же, как под действием сил Pj, Pj. Р3. Pa- т- е, новая система сил эквивалентна прежней. Это же произойдет, если из заданной системы сил, приложенных к Твердому телу, исключить взаимно уравновешивающиеся силы, входящие в ее состав. 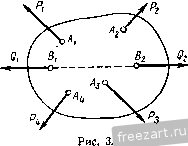 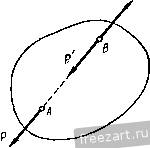 воположные стороны. Рис, 4. Следствие. Не изменяя кинематического состояния абсолютно твердого тела, силу можно переносить вдоль линии ее действия, сохраняя неизменными ее модуль и направление. Предположим, что к твердому телу в точке А приложена сила Р (рис. 4). Приложим в точке В две силы Р' и Р , равные по модулю силе Р и направленные по ее линии действия в проти-Затем отбросим силы Р и Р как взаимно уравновешивающиеся. Тогда к телу в точке В будет приложена сила Р'=Р, эквивалентная силе Р .в точке А. Таким образом, силу можно переносить в любую точку по линии действия, не изменяя ее модуля и направления. Поэтому в статике твердого тела сила рассматривается как скользящий вектор. 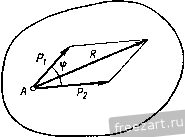 Рис. 5. 4. Аксиома параллелограмма сил Равнодействующая двух пересекающихся сил приложена сил приложена в точке их пересечения и изображается диагональю параллелограмма, построенного на этих силах (рис. 5). Это положение, хорошо известное из элементарного курса физики, выражается следующим геометрическим равенством: R = P,+ P2. Модуль равнодействующей силы определяется по следующей формуле: R = Vpf +Рг + 2ЛР2 cos ср, (2.1) где ср -угол между направлениями сил Pj и Pj. 5. Аксиома равенства действия и противодействия Всякому действию соответствует равное и противоположно направленное противодействие. Эта аксиома утверждает, что силы действия друг на друга двух тел равны по модулю и направлены по одной прямой в противоположные стороны. Таким образом, в природе не существует одностороннего действия силы. Аксиома действия и противодействия установлена Ньютоном и известна как один из основных законов классической механики. 6. Аксиома сохранения равновесия сил, приложенных к деформирующемуся телу, при его затвердевании Равновесие сил, приложенных к деформирующемуся телу, сохраняется при его затвердевании. Из этой аксиомы следует, что условия равновесия сил, приложенных к абсолютно твердому телу, должны выполняться и для сил, приложенных к деформирующемуся телу. Однако в случае де- а) формирующегося тела эти условия р д В необходимы, но недостаточны. { ---- i Так, например, условие равновесия двух сил, приложенных к твердому стержню на его концах, В п состоит в том, что силы равны по Pi г- . модулю и направлены по одной прямой в противоположные сто- Рис. 6. роны (рис. 6,а и б). Две уравновешивающиеся силы, приложенные к нити, удовлетворяют этому условию, но при наличии добавочного условия - си.аы должны только растягивать, а не сжимать нить (рис. 6,а). § 3. Несвободное твердое тело. Связи. Реакции связей Твердое тело называется свободным, если оно может перемещаться в пространстве в любом направлении. Тело, ограничивающее свободу движения данного твердого тела, является по отношению к нему связью. Твердое тело, свобода движения которого ограничена связями, называется несвободным. Все силы, действующие на несвободное твердое тело, наряду с делением на внешние и внутренние силы, можно также разделить на задаваемые силы и реакции связей. Задаваемые силы выражают действие на твердое тело других тел, вызывающих или способных вызвать изменение его кинематического состояния. Реакцией связи называется сила или система сил, выражающая механическое действие связи на тело Одним из основных положений механики является принцип осво-бождаемости твердых тел от связей, согласно которому несвободное твердое тело можно рассматривать как свободное, на которое, кроме задаваемых сил, действуют реакции связей.   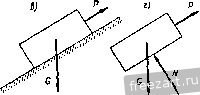 Рис. 7. В Пусть, например, на гладкой неподвижной горизонтальной плоскости покоится шар (рис. 7, а). Плоскость, ограничивая движение шара, является для него связью. Если мысленно освободить шар от связи (рис. 7, б), то для удержания его в покое к нему в точке касания с плоскостью нужно приложи!ь силу N, равную весу шара G по модулю и противоположную ему по направлению. Сила N и будет реакцией плоскости. Тогда шар, освобожденный от связи, будет свободным телом, на которое действует заданная сила Q и реакция плоскости N. Гладкая плоскость не противодействует перемещению тела вдоль плоскости под р„ g действием задаваемых сил (рис. 7, в), но не допускает его перемещения в направлении, перпендикулярном к плоскости. Поэтому действие плоскости на тело выражается нормальной реакцией N (рис. 7, г). Реакция гладкой плоскости направлена перпендикулярно к плоскости. Если к концу В нити АВ, прикрепленной в точке А, подвесить груз весом О (рис. 8, а), то реакция S ниги будет приложена 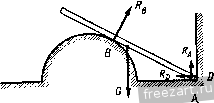 Рис 9 к грузу в точке В, равна по модулю его весу G и направлена вертикально вверх (рис. 8, б). Реакция нити направлена вдоль нити. Пусть балка весом G в точке В опирается на гладкую поверхность, а в точках А и D-на гладкие горизонтальную и вертикальную плоскости (рис. 9) Тогда реакции опорной поверхности и опорных плоскостей будут иметь указанные на рис. 9 направления. Определение модулей этих реакций показано после установления условий равновесия сил, произвольно расположенных на плоскости (§ 25). Для определения каждой реакции нужно знать три ее элемента: модуль, направление и точку приложения. Точка приложения реакции, как правило, бывает известна. Направление же реакций известно лишь для некоторых типов связей Если существуют два взаимно перпендикулярных направления на плоскости, в одном из которых связь препятствует перемещению тела, а в другом нет, то направление ее реакции противоположно первому направлению. Так, например, гладкая горизонтальная плоскость препятствует перемещению шара вертикально вниз и не препятствует его горизонтальному перемещению. В этом случае реакция плоскости направлена вверх (рис. 7, б). Так же определяется направление реакции нити (рис. 8). Гладкая поверхность, на которую опирается балка точкой В (рис. 9), препятствует перемещению балки по нормали к поверхности вниз и не препятствует перемещению вдоль оси балки. Поэтому реакция этой поверхности направлена по нормали к поверхности вверх. Аналогично, если балка опирается на ребро в точке D (точечная опора), то реакция в точке D направлена перпендикулярно к оси балки (рис. 10) Рассмотрим два основных типа опор балок и их реакции. На рис. 11 изображена шарнирно-неподвижная опора, которая препятствует любому поступательному движению балки, но дает ей возаюжность свободно поворачиваться вокруг оси шарнира. По своей конструкции такая шарнирная опора состоит из двух обойм, из которых одна закреплена на балке, а другая - на неподвижной пйверх-ности. Эти обоймы соединяются при помощи цилиндрического 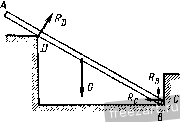 Рис 10 валика (на рис. 11 показано среднее сечение конструкции). В зависимости от действующих сил, валик может прижиматься к различным точкам обоймы. Реакция R такой опоры проходит через центр шарнира О и точку соприкасания А (рис. 12а, б). Линия действия реакции этой опоры всегда проходит 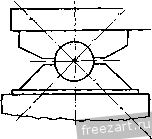 через центр шарнира, но модуль и направление реакции не известны. т17> бал   Обойма. Рис. И. Рис. 12. Шарнирно-подвижная опора, нижняя обойма которой поставлена на катки, не препятствует перемещению балки парал лельно опорной плоскости (рис. 13). Если не учитывать трения катков, то линию действия реакции такой ойоры следует считать проходящей через центр шарнира перпендикулярно к опорной плоскости. Таким образом, не известен лишь модуль этой реакции. В курсе теоретической механики обычно рассматривают только действие внешних сил на абсолютно твердое 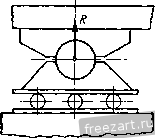
Рис. 13. Рис. 14. тело. Однако при расчете различных конструкций бывает необходимо определять внутренние силы, возникающие в растянутых и сжатых стержнях. Для определения внутренних усилий в стержнях воспользуемся так называемым методом сечения, дающим возможность переводить интересующие нас внутренние силы в разряд внешних сил. Рассмотрим сущность этого метода. Пусть стержень АВ, весом которого пренебрегаем, растягивается двумя равными по модулю силами Pj и Pj, приложенными к его концам (рис. 14). Рассечем мысленно стержень, разделив его на две произвольные части AD и DB. На часть AD действуют две уравновешивающиеся силы; внешняя сила Pi и внутреннее усилие Si, заменяющее действие отброшенной части стержня. Из второй аксиомы следует, что внутреннее усилие Sj направлено по оси стержня и равно по модулю силе Pi. Внутреннее усилие Si, выражающее действие отброшенной части DB на рассматриваемую AD, является по отношению к рассматриваемой части стержня внешней силой. 5} р> ..... -А в Рис. 15. Если стержень АВ растягивается (рис. 15, а) или сжимается (рис. 15, б) силами Pi и Pj, то на тела, вызывающие его растяжение или сжатие, со стороны стержня действуют реакции Sj и S2. При этом реакции растянутого стержня равны по модулю задаваемым силам и направлены по оси стержня от его концов. Реакции сжатого стержня равны по модулю заданным силам и направлены по оси стержня к его концам. Так как реакции и внутренние усилия по модулю равны, то для определения усилия в стержне достаточно определить его реакцию. ГЛАВА и СИСТЕМА СХОДЯЩИХСЯ СИЛ НА ПЛОСКОСТИ § 4. Сложение двух сходящихся сил. Параллелограмм и треугольник сил Сходящимися называются силы, линии действия которых пересекаются в одной точке. Если к телу приложены две силы, линии действия которых пересекаются в одной точке, то, как указывалось в аксиоме параллелограмма сил, их равнодействующая приложена в точке А пересечения линий действия сил; она изображается диагональю параллелограмма, построенного на этих силах (рис. 16). Построение параллелограмма сил можно заменить построением треугольника сил ABD (рис. 17). Направление равнодействующей силы R по контуру силового треугольника противоположно направлению обхода контура треугольника, определяемому слагаемыми силами. При помощи параллелограмма или треугольника сил можно решить и обратную задачу - разложить силу Р на две составляющие Pi и Pj, приложенные в той же точке и направленные по заданным линиям действия KL и DE (рис. 18 и 19). Используя известные формулы тригонометрии (теорему синусов), имее\1 р2 Р sinp sin а sin (180° -ср) 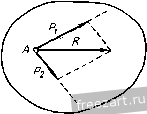 Рис. 16. 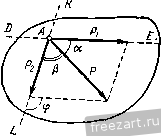 Рис. 18. Так как (р = а + р, то 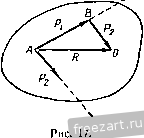 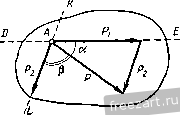 Рис. 19. 1 - sin( + p) Р - р sin а § б. Многоугольник сил. Условие равновесия сходящихся сил Пусть к твердому телу в точках Лр А^, Лд, А^, Лд приложены сходящиеся силы Pj, Pj, Р3, Р4 и Pg (рис. 20). Все эти силы можно перенести в точку О пересечения их линий действия и, строя треугольники сил, последовательно сложить. Тогда равнодействующая этих сил изобразится замыкающей стороной многоугольника сил. Таким образом, равнодействующая R сходящихся сил приложена в точке пересечения линий действия сил и равна их геометрической сумме: R = Pi + P2+ Н-Р„- 1 2 3 4 ... 44 |
 |
 |